
细品经典:LeNet-1, LeNet-4, LeNet-5, Boosted LeNet-4
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

Baseline Linear Classifier
One-Hidden-Layer Fully Connected Multilayer NN
Two-Hidden-Layer Fully Connected Multilayer NN
LeNet-1
LeNet-4
LeNet-5
Boosted LeNet-4
整理自:https://medium.com/@sh.tsang/paper-brief-review-of-lenet-1-lenet-4-lenet-5-boosted-lenet-4-image-classification-1f5f809dbf17
https://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=5
假设我们已经掌握了深度学习组件的基本知识,如卷积层、池化层、全连接层、激活函数等。
1.Baseline Liner Classifier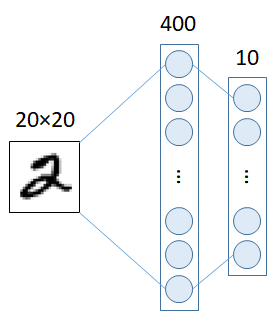
2.One-Hidden-Layer Fully Connected Multilayer NN
One-Hidden-Layer Fully Connected Multilayer NN在输入层和输出层之间增加一隐含层,隐含层神经元数量为300个,即20×20 - 300 - 10网络,测试数据的错误率为3.6%。隐含层有1000个神经元,即20×20 - 1000 - 10网络,测试数据的错误率为3.8%。
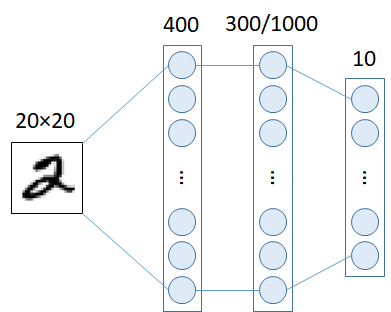
3.Two-Hidden-Layer Fully Connected Multilayer NN

在输入层和输出层之间增加两个隐藏层,28×28 - 300 - 100-10网络的,测试数据的错误率为3.05%。 28×28 - 1000 - 150 - 10网络,测试数据错误率为2.95%。我们可以看到,通过添加隐藏层,错误率越来越小。但是,这种改善也在变得缓慢。LeNet-1
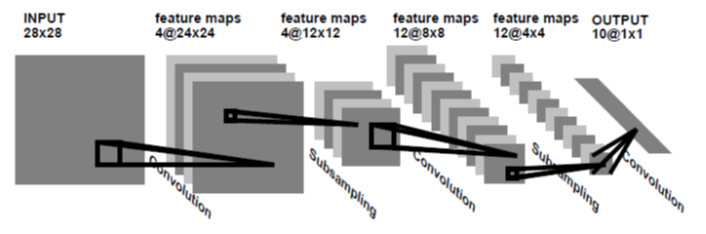
在Lenet-1中, 28x28 的输入图像 --> 4个24×24 feature maps卷积层(5×5 size) -->平均池化层(2×2大小) -->8个12×12 feature maps 卷积层(5×5 size)--> 平均池化层(2×2大小)--> 直接全连接后输出引入卷积和下采样/池化层后,LeNet-1对测试数据的错误率为1.7%值得注意的是,在作者发明LeNet时,他们使用平均池化层,输出2×2特征图的平均值。目前很多LeNet实现使用max pooling只输出2×2 feature map的最大值,这有助于加快训练速度。当选择最强的特征时,反向传播可以得到较大的梯度。LeNet-4
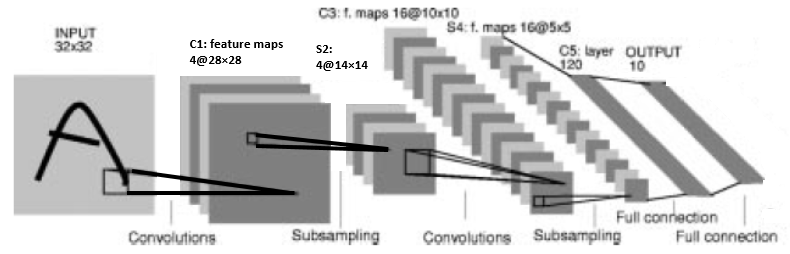
LeNet-5
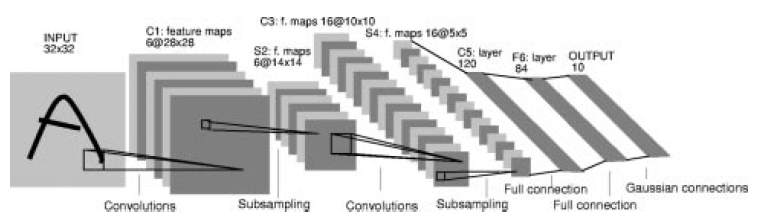
LeNet-5是最受欢迎的LeNet-5,与LeNet-4相比只有细微差别
32x32的输入图像 => 6个28×28 feature maps 卷积层(5×5 size) => 平均池化层(2×2大小)=>16个10×10 feature maps 卷积层(5×5 size) => 平均池化层(2×2大小)=>全连接到120个神经元 => 全连接84个神经元 => 全连接到10个输出有了更多的feature map和多一个全连接层,测试数据的错误率为0.95%。Boosted LeNet-4
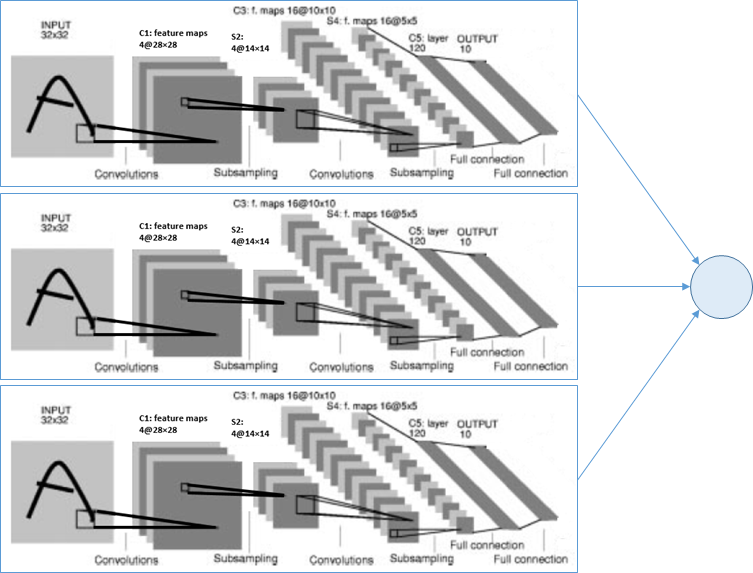
Boosting是一种将几个或多个弱分类器的结果进行组合以获得更精确结果的技术。在LeNet-4中,将三个LeNet-4的输出简单相加,其中值最大的就是预测的分类类。当第一个网有一个很高的置信度答案,将会提升,其他网络不会被调用。使用boosting,测试数据的错误率为0.7%,甚至比LeNet-5的错误率还要低。这种boosting 技术已经使用了很多年,直到现在。Summary on Error Rate
Baseline Linear Classifier: 8.4%
One-Hidden-Layer Fully Connected Multilayer NN: 3.6% to 3.8%
Two-Hidden-Layer Fully Connected Multilayer NN: 2.95% to 3.05%
LeNet-1: 1.7%
LeNet-4: 1.1%
LeNet-5: 0.95%
Boosted LeNet-4: 0.7%
在这几篇文章[1-3]中,实际上有很多关于深度学习的基本技术都有详细的描述。此外,不同版本的LeNet甚至还与其他传统方法如PCA、k-NN、SVM进行了比较。
我们需要注意的是:
9.1. Activation Function
Tanh 用作激活函数,但输出部分除外。 Sigmoid作为在输出端的激活函数。 ReLU在那些年没有使用。
[如今]以及后来的研究发现,ReLU是一个在训练过程中加速收敛的较好的激活函数。
9.2. Pooling Layer
如前所述,LeNet使用平均池化而不是最大池化。
[现在]最大池化非常常见,甚至没有池化层。
9.3. Hidden Layers
在过去,隐藏层的数量很少,性能不可能通过增加更多的层来提高太多。
[现在]它可以是成百上千的隐藏层。
9.4. Training Time
在过去,训练需要几天时间。
[现在]但现在,它只是一个小的网络GPU加速。
10.Conclusions总之,LeNet的论文确实值得一读,尤其是对于深度学习的初学者。
https://medium.com/@sh.tsang/very-quick-setup-for-style-recognition-using-pretrained-caffenet-alexnet-using-nvidia-docker-2-0-927a42634bb0
References[1989 NIPS] [LeNet-1] Handwritten Digit Recognition with a Back-Propagation Network
http://yann.lecun.com/exdb/publis/pdf/lecun-90c.pdf
[1995 ICANN] [LeNet-1, LeNet-4, LeNet-5, Boosted LeNet-4] Comparison of Learning Algorithms for Handwritten Digit Recognition
http://yann.lecun.com/exdb/publis/pdf/lecun-01a.pdf
[1998 Proc. IEEE] [LeNet-1, LeNet-4, LeNet-5, Boosted LeNet-4] Gradient-Based Learning Applied to Document Recognition
http://yann.lecun.com/exdb/publis/pdf/lecun-01a.pdf
VERY QUICK SETUP of LeNet-5 for Handwritten Digit Classification Using Nvidia-Docker
https://medium.com/@sh.tsang/very-quick-setup-of-lenet-5-for-written-digit-classification-using-nvidia-docker-2-0-a4e7ba76c68a
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~