点击上方“AI算法与图像处理”,选择加"星标"或“置顶”
重磅干货,第一时间送达

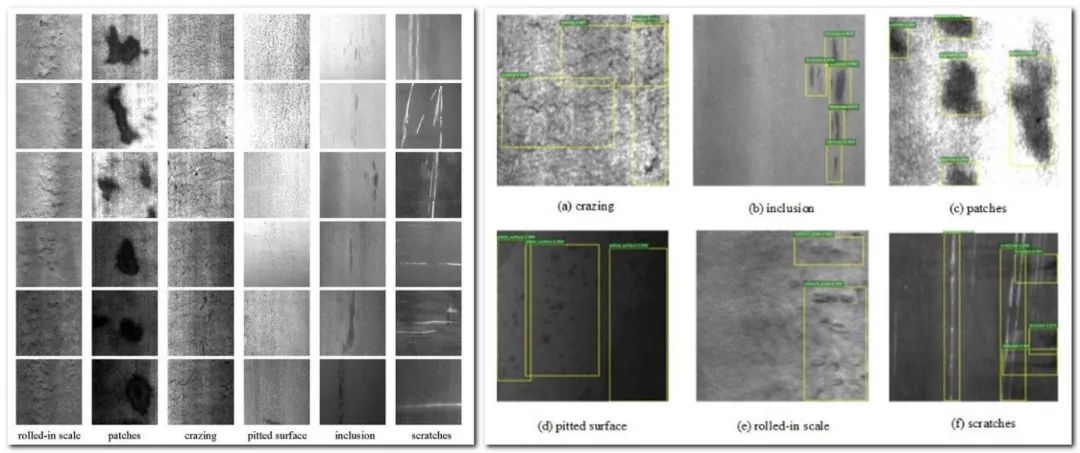
计算机视觉是一项通过计算机系统分析图像(包括视频)的技术。越来越多的图像处理算法促进计算机视觉在自动驾驶、工业机器人以及其领域的应用。采矿和自然资源的加工变得越来越复杂,他们涉及在极其恶劣的条件下进行作业。无论是在几公里深的煤矿中开采煤炭还是在海底钻探油井,从事这些工作的人都面临着严重的风险,在危险条件下用机器代替人工更为可取。通过使用人工智能(AI),可任意实现这一目标。工业4.0意味着向全自动化数字生产的过渡,该过程由智能系统实时控制,同时不断与环境进行交互。这个概念的核心是“数字”的创建,它是指对实际实物资产进行数字化。实施工业 4.0的前提条件是安装传感器收集有关过程的数据并进行分析。摄像机是最好的传感器之一,计算机视觉系统可以获取真实对象的视觉表示,过程并在后期进行分析以解决各种应用任务。CV在工业中有很多实际应用,从生产线上的产品质量控制到安全监控等等。这是计算机视觉领域中一些最常见的工业案例研究。人工视觉检查的结果很大程度上取决于操作员的能力,经验和专心程度。这个相当费力过程会导致遗漏或分类错误等问题。为了减少人的影响,提高质量控制过程的准确性和可靠性,可以采用计算机视觉系统。主要有以下两种检测方案,半成品的控制和成品的检查。借助神经网络,能够检测出92%-99%有缺陷的产品,误报占3-4%。这样的性能比率完全可以让计算机视觉代替人力。遗漏的缺陷可能会导致非常严重问题,因此很多人已经在研究这种情况了。除了视觉分析外,还有其他无损检测方法,例如超声,涡流和X射线控制。除传统相机外,还可以使用有关物体表面温度和几何数据的信息。
现代计算机视觉系统能够识别工业资产的潜在危险情况。根据指定的参数对事件进行跟踪,可以最大程度地减少危险事件的发生,确保设备持续运行,并减少工伤风险。通过使用摄像机和生产现场其他传感器的数据,可以保证人们更加安全地工作。其中包括对个人防护设备的磨损(头盔,安全电缆,工作服,耳机)的控制以及人员在危险区域的存在。这种解决方案可自动检测违规情况并向人员提供合理的反馈,从而形成安全的工作习惯。如果有人出现在危险区域中,则会触发警报。借助视频分析,还可以检测出明火,管道破裂,泄漏,识别围栏断裂或任何试图将物品带出保护区之外并试图检测遗弃物体的情况。在某些地区(例如加油站等),也可以跟踪吸烟者或移动电话的使用情况。除此之外还可以进行疲劳检测。该系统跟踪员工的活动改善任务分配管理。
计算机视觉用于监控生产设施和基础设施。视频分析的功能范围包括对移动物体和车辆以及设备和人员位置的检测和定位。可以超越人类的能力来精确地识别和跟踪不同的活动。基于此监视,智能任务分配可以提高生产率并增加整体设备使用率。矿石开采方面现在,我们可以对采矿和运输过程中移动的矿石块进行分类,计数和估算大小。岩石碎片分析使调整爆破操作成为可能。这样的系统使过程生产率提高了3-4%。光学粒度仪可实时了解已完成的工作。一个相关的任务是监视传送带上的碎石,以发现破碎和分选厂中的异常物体。送入设备以进行后续处理的矿石碎片尺寸估算值可以自动调整破碎机的模式,并实现最佳产量。设计用于在钻孔过程后自动对岩石类型进行分类的系统,有助于比人类更快,更准确地识别发现的矿物集合。还有一些监控系统可以实时确定铲斗挖掘机齿的存在。仅损失一颗铲斗齿就使挖掘机的生产率降低了约1.3%。此外,如果牙齿到达破碎机,这可能会造成损坏和停机,相当于每小时$ 8,000,不包括搜索和维修费用。在丢失和损坏的情况下,给操作员的音频信号可将这些负面影响降至最低。使用无人驾驶飞机进入危险区域:公司使用无人机监控其资产和运营,采石场和水坝,并检测管道基础设施中的泄漏。还有一种解决方案,可以分析废弃地下矿井的结构和条件,以控制不安全条件下的沉降和水污染。借助这项技术,岩土工程师可以更好地还原矿图并安全地监视其当前状态。在冶金学中,计算机视觉具有控制质量,确定合金的微观结构和机械性能以及寻找具有所需特性的新材料的潜力。事实证明,机器学习和专家的合理参与可以完美地解决合金评估的任务。从最初的发现到商业化,材料的设计和开发在过去花费了数十年的时间。通过使用存储的实验室数据,计算机视觉可以发现材料,设计和预测其性能。由于晶粒结构会影响钢的开裂,因此可视化裂缝可用于链接宏观机械和微观结构特性,以预测裂纹扩展路径。冶金中的缺陷检测技术具有其独特的性质,除了传统的摄像头外,还需要使用其他分析工具。例如,通过颜色分析进行的表面温度评估可以揭示有害矿物质的污染程度以及工艺或反应器条件。特别是,已经成功地训练了神经网络来识别珍珠岩,铁素体,马氏体和渗碳体。
在过去的几十年中,工业机器人对不同物体的捕获和处理几乎取代了体力劳动。工业机器人的第一个模型旨在执行简单的任务。现在,机器人和协作机器人可以使用抓斗或真空杯来重新放置对象。他们喷漆,弯线,执行点焊和执行其他常规操作。配备计算机视觉系统的现代机器人可以执行任务,任务的特点是工件的位置变化很大。机器人已经在工业中使用了很长时间,但是AI才刚刚开始渗透到这一领域。从历史上看,用于工业应用的GPU计算是一个相当新的领域,工业计算机视觉涉及一系列传感器,而不仅仅是视频流。具有计算机视觉系统的机器人能够通过分析3D摄像机的视频流以及激光和传感器数据来考虑对象的位置。这种方法使机器人几乎可以在任何条件下高精度地执行任务。具有计算机视觉的机器人需要更少的编程。在启动之前,它们仅应配置一次。此外,机器人还可以在几乎没有停机的情况下无缝切换任务。由于具有很高的灵活性,几乎不需要编程,因此计算机视觉机器人无需知道零件的确切参数即可有效地完成工作。机器人的适应性使他们可以选择所需的零件,对其进行本地化并从任何位置进行分级。设备设置中的少量投资也是最明显的好处之一。
Dex-Net 4.0是一个带有手臂的机器人,以惊人的精度抓取物体。它能够以每小时高达300个对象的速度捕获95%的对象。它评估了几个选项,可在几秒钟内捕获一个对象。人类每小时可以捕获400到600个物体。计算机视觉继续扩展工业机器人的功能,并找到提高常规任务生产率的新方法。随着电子商务的发展,物流机器人已成为一个有前途的机器人领域。他们服务于货物交付并与人类合作。他们可以运输重达15公斤的货物,在困难的条件下航行并在人与人之间有效地机动。自主移动机器人可以在不支持标记,电线,磁铁或精确定位目标等基础设施的情况下工作。它们提高了生产效率并降低了成本,因此成为生产环境的重要组成部分。仓库机器人使亚马逊能够将每个仓库的运营成本降低约20%(每年节省约2200万美元)。根据麦肯锡全球研究所(MGI)的说法,由于各种操作自动化,整个行业节省的成本可能在15%到90%之间,具体取决于行业。
亚马逊仓库机器人
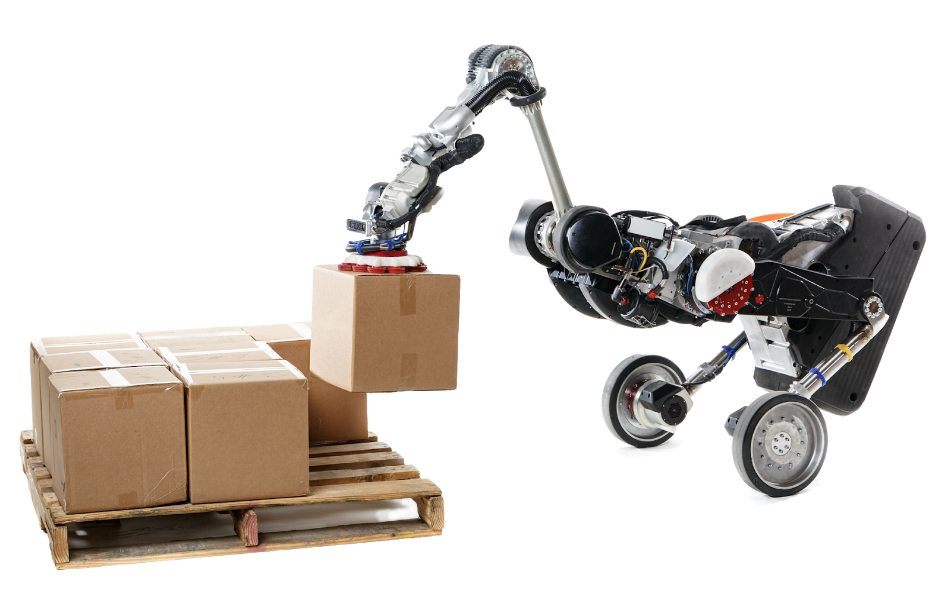
在计划机器人操纵时,将使用计算机视觉来避免碰撞。算法的数据源是安装在机器人上的激光雷达。首先检测物体,然后开始运动跟踪。机器人需要了解环境并预测其他人的运动,这在不断变化的环境中移动时必不可少。导航并避免障碍;记住并考虑到行进的路径并将自己定位在太空中-所有这些任务都可以使用计算机视觉原理来解决。已经存在几种类型的物流机器人,以及用于自动化仓储的复杂解决方案,包括工业机械手,移动机器人手推车和码垛机。波士顿动力公司于三月份推出了新的Handle机器人装载机。它们比叉车快,能够分拣托盘中的物品并将存储单元转移到传送带上。这些两轮平衡机器人中的每一个都配备有机械手和真空手柄以及计算机视觉模型,该模型可以使其在仓库中导航并选择所需的架子和盒子。先进的计算机视觉和抓手将扩大物流机器人的应用范围。下载1:leetcode 开源书
在「AI算法与图像处理」公众号后台回复:leetcode,即可下载。每题都 runtime beats 100% 的开源好书,你值得拥有!
在「AI算法与图像处理」公众号后台回复:CVPR2020,即可下载1467篇CVPR 2020论文